1.1.1.5. Position et trajectoire#
1.1.1.5.1. Vecteur position#
1.1.1.5.1.1. Vecteur position: Définition#
Important
Vecteur position
On définit la position d’un point matériel M dans un référentiel \(\mathfrak{R}\) à l’aide du vecteur position \(\overrightarrow{OM}\) où O est un point fixe du référentiel.
Important
Equation horaire et trajectoire
L’évolution du mouvement du point matériel \(\overrightarrow{OM}(t)\) est appelée équation horaire. Elle est aussi définie par les composantes du vecteur position dans la base de projection. La courbe paramètrée (ou trace) ainsi définie est appelée trajectoire.
1.1.1.5.1.2. Expression du vecteur position#
Important
Expressions
On peut exprimer le vecteur position dans les différents repères. Les vecteurs des bases locales sont exprimées au point M mobile:
Coordonnées cartésiennes: \(\overrightarrow{OM}(t) = x_M(t) \overrightarrow{e_x} + y_M(t) \overrightarrow{e_y} + z_M(t) \overrightarrow{e_z}\).
Coordonnées cylindrique: \(\overrightarrow{OM}(t) = \rho_M(t) \overrightarrow{e_r}(t) + z_M(t) \overrightarrow{e_z}\).
Coordonnées sphériques: \(\overrightarrow{OM}(t) = r_M(t) \overrightarrow{e_r}(t)\).
1.1.1.5.2. Trajectoires usuelles#
1.1.1.5.2.1. Trajectoire rectiligne#
Important
Mouvement rectiligne
Un mouvement rectiligne est un mouvement dont la trajectoire est portée par une droite (ou un segment) fixe dans le référentiel d’étude. Il se fait suivant une direction de l’espace: c’est un mouvement à 1 degré de liberté.
1.1.1.5.2.2. Trajectoire circulaire#
Important
Mouvement circulaire
Un mouvement est dit circulaire si le point M se déplace sur un cercle (ou une portion de cercle) fixe dans le référentiel R. C’est aussi un mouvement à 1 degré de liberté.
1.1.1.5.2.3. Trajectoire elliptique#
Important
Ellipse
Une ellipse est une courbe fermée qu’on peut caractériser/reconnaître de plusieurs manières:
Lieu géométrique (peu usité en physique): Soit deux points, appelées foyers, \(F_1\) et \(F_2\) et un réel positif K, l’ensemble des points M tel que \(MF_1 + MF_2 = K\) décrit une ellipse. Le milieu du segment \(F_1 F_2\) est appelé centre de l’ellipse.
Représentation polaire (fondamentale): Soit un point F centre d’un repère polaire. L’ensemble des points M dont les coordonnées du vecteur position \(\overrightarrow{FM}\) sont tels que \(r = \frac{p}{1 + e \cos{(\theta - \theta_0)}}\) avec \(p > 0\) et \(0 \leq e < 1\) décrit une ellipse. Le point F est un des foyers de l’ellipse. On dit que p est le paramètre de l’ellipse et que e est l’excentricité de l’ellipse.
Représentation cartésienne (savoir la reconnaître). L’ensemble des M dont les coordonnées \((x,y)\) sont telles que: \({(\frac{x}{a})}^2 + {(\frac{y}{b})}^2 = 1\) décrit une ellipse dont le centre est le centre du repère.
Représentation paramétrique (savoir la reconnaître): L’ensemble des M dont les coordonnées \((x(t) = a \cos t ; y(t) = b \sin(t))\) décrit une ellipse dont le centre est le centre du repère.
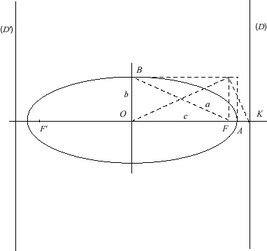
Les caractéristiques utiles sont:
le demi-grand axe a (=OA)
le demi-petit axe b (=OB)
la distance focale c (=OF)
1.1.1.5.2.4. Trajectoire parabolique#
Important
Parabole
Une parabole est une courbe non fermée qu’on peut caractériser/reconnaître de plusieurs manières:
Représentation polaire (fondamentale): Soit un point F centre d’un repère polaire. L’ensemble des points M dont les coordonnées du vecteur position \(\overrightarrow{FM}\) sont tels que \(r = \frac{p}{1 + e \cos{\theta - \theta_0}}\) avec \(p > 0\) et \(e = 1\) décrit une parabole. Le point F est appelé foyer de la parabole. On dit que p est le paramètre de la parabole et que e est l’excentricité de la parabole.
Représentation cartésienne (savoir la reconnaître). L’ensemble des M dont les coordonnées \((x,y)\) sont telles que: \(y = ax^2 + bx + c\) décrit une parabole d’axe de symétrie parallèle à Oy.
1.1.1.5.2.5. Coniques#
Important
Equation polaire d’une conique
En choisissant correctement l’origine du repère polaire, on peut exprimer l’équation polaire d’une conique sous la forme:
Le centre du repère est alors appelée foyer de la conique. A noter que l’ellipse et la parabole possède deux foyers symétriques par rapport au centre de la conique (centre de symétrie de la conique).
p est appelée paramètre de l’ellipse et e excentricité. En changeant l’origine des angles, on peut faire en sorte de \(\theta_0 = 0\).
De nombreuses propriétés seront vues sur les coniques lors du cours sur les potentiels newtoniens. On retiendra déjà que la valeur de l’excentricité déterminer le type de conique:
ellipse: \(0 \leq e < 1\)
parabole: \(e = 1\)
hyperbole: \(e > 1\). Attention, en coordonnées polaires, les asymptotes sont en général obliques.