6.2.1. Méthodes#

6.2.1.1. Cinétique#
Calcul de la quantité de mouvement
On considère un cylindre d’axe Oz fixe dans un référentiel \(\mathfrak{R}\) et de masse uniformément répartie en rotation autour de l’axe Oz. Déterminer la quantité de mouvement du cylindre.
On considère un système composé de pièces de masse respectives \(m_1\) et \(m_2\). La première est en translation à une vitesse \(\overrightarrow{v_0}\) dans un référentiel \(\mathfrak{R}\). La seconde est en translation à une vitesse \(\overrightarrow{v_{2/1}}\) par rapport à la première pièce. Déterminer la quantité de mouvement du système total.
On considère un disque d’épaisseur \(h\) et de rayon \(R\) de masse totale \(M\) répartie de manière homogène. Il tourne autour d’un axe \(Oz\) où O est distance de \(R/2\) par rapport avec à G. La rotation se fait à vitesse angulaire constante \(\omega\). Déterminer la quantité de mouvement du disque.
Moment d’inertie et moment cinétique
On considère un solide S constitué de deux tiges de longueurs L pouvant coulisser l’une sur l’autre. La tige placée en dessous est accrochée par une extrémité à un axe fixe dans un référentiel \(\mathfrak{R}\). Préciser sans calcul pour quelles positions de la tige supérieure le moment d’inertie est maximal ou minimal.
Déterminer le moment d’inertie d’un point matériel de masse m sur un axe\(\Delta\) situé à une distance d.
On considère deux cylindriques concentriques de moment d’inertie respectifs \(J_1\) et \(J_2\) sur leur axe de symétrie et tournant chacun à des vitesses angulaires \(\omega_1\) et \(\omega_2\) autour de cet axe. Déterminer le moment cinétique et l’énergie cinétique de l’ensemble constitué des deux cylindres.
6.2.1.2. Force et statique#
Force et moment résultant
On considère une tige de longueur \(L\) dont le milieu est noté O qu’on prend comme origine d’un repère cartésien \((O, \overrightarrow{e}_x, \overrightarrow{e}_y, \overrightarrow{e}_z)\). Elle soumise à une action extérieure uniforme sur toute sa longueur. Cette action globale est décomposée en des actions quasi-ponctuelles : on suppose qu’un petit élément de longueur \(dl\) de la tige est soumis à une action quasi-ponctuelle \(\overrightarrow{dF} = \Lambda dl \overrightarrow{e}_x\) avec \(\overrightarrow{e}_x\).
Déterminer par intégration la force résultante \(\overrightarrow{F}\) exercée sur la tige.
Déterminer par intégration le moment résultant \(\overrightarrow{M}_A\) calculé au point A de l’action considérée, A étant une extrémité de la tige. On traitera deux cas :
La tige est suivant l’axe Ox (A est en \(x=-\frac{L}{2}\)).
La tige est suivant l’axe Oy (A est en \(y=-\frac{L}{2}\)).
Reprendre les mêmes calculs pour calcul le moment résultant au point O.
Cet exercice montre comment calculé les composantes d’une actions de contact quand elles ne sont pas connues : en utilisant les théorèmes TMC et TRD.
Equilibre d’un cube
On étudie un cube (de masse uniformément répartie) sur un plan incliné. On admet qu’à l’équilibre, la somme des forces résultats est nulle et la somme des moments résultants en un même point est nulle.
Représenter la force résultante de l’action du poids en un point judicieusement choisi.
On considère un point B à la surface du plan situé au plus bas ou plus haut que le cube (donc pas sur la surface de contact). En raisonnant sur les actions ponctuelles de contact, justifier que le moment résultant en B ne peut jamais être nul.
Le cube est immobile. Par une analyse du bilan des actions, représenter la force résultante de l’action du plan incliné sur le cube en un point où son moment est nul.
Que se passe-t-il si l’on incline trop le plan ?
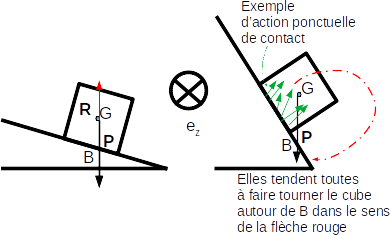
Fig. 6.1 Actions sur le cube#
Cylindre sur plan incliné
On considère un cylindre de rayon R, de hauteur h et de masse M uniformément répartie placé sur un plan incliné d’angle \(\alpha\).
Sur un plan de coupe, représenter les forces résultantes associées à chaque action extérieure sur le cylindre. On distinguera deux cas suivant le comportement de l’action de contact.
Le cylindre peut-il rester immobile ? Peut-il glisser sans rouler ? Peut-il rouler sans glisser ? On expliquera ceci au moyen d’un bilan des actions.
6.2.1.3. Dynamique#
Volant freiné
On considère un volant qui tourne autour d’un axe fixe horizontal. Son moment d’inertie autour de cet axe vaut J. Son centre d’inertie est sur l’axe et le champ de pesanteur est uniforme et constant. Au cours du mouvement, le volant subit des frottements solides qu’on modélise comme un couple constant dont le moment par rapport à l’axe de rotation est \(\vert M_f \vert = \alpha J\) avec \(\alpha\) constant. On lance le volant à une vitesse angulaire \(\omega_0\) et celui-ci s’immobilise après N tours.
Exprimer le coefficient \(\alpha\) en fonction de \(\omega_0\) et N.
Cet exercice présente trois points importants: la capacité à paramétrer correctement un problème, le calcul d’un moment d’une force et l’analyse physique d’un système en rotation par étude des moments. Nous en profiterons pour aborder qualitativement deux notions importantes: la notion d’équilibre et la notion de stabilité.
Cas d’un système de points.
On considère un cube de côté a et de répartition de masse uniformément répartie en liaison pivot avec un axe passant par le centre du cube et perpendiculaire à deux des faces du cube. Le cube ne peut ainsi que tourner autour de cet axe supposé fixe dans un référentiel \(\mathfrak{R}\). Tous les éléments cinématiques et cinétiques devront être établis dans ce référentiel qu’on supposera galiléen.
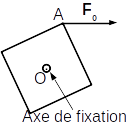
On attache un fil tendu à un coin du cube noté A. On considère que la liaison entre le cube et le fil se résume à un seul point de sorte qu’on puisse considérer l’action du ressort sur le cube comme ponctuelle. La force appliqué par le fil sur le cube est toujours horizontale et de norme \(F_0\).
Paramétrer le problème (proposer un système de coordonnées et des paramètres utiles au problème) pour pouvoir étudier la rotation du cube autour de son axe. Proposer alors une expression du moment cinétique du cube sur l’axe de rotation,de son énergie cinétique et de sa quantité de mouvement. On notera J le moment d’inertie du cube sur l’axe de rotation et M sa masse totale.
Exprimer le moment de la force exercé par le fil sur le cube exprimé au centre du cube. Commenter suivant les valeurs des paramètres introduits la tendance qu’aura cette force à agir sur la rotation du cube.
On suppose la liaison pivot parfaite. Quelles sont les positions d’équilibre du système ? Si l’on écarte légèrement le cube de chacune de ces positions, aura-t-il tendance a revenir à la position d’équilibre ? (On parle de stabilité des positions d’équilibre).