Il est délicat de visualiser les propriétés précédentes et d’autres que nous allons voir pour des systèmes à multiples degrés de liberté car on ne peut avoir de représentation graphique simple de l’énergie potentielle. Par contre, pour un système à 1 degré de liberté, les représentations sont possibles. Nous allons travailler sur un tel système qui sera très présent en physique.
Plusieurs éléments d’explications graphiques et d’exemples sont disponibles en ligne.
3.1.2.1.1. Système à 1 degré de liberté et profil#
Important
Système à 1 degré de liberté
Un système à degré de liberté est un système où toutes les grandeurs peuvent être décrites comme des fonctions d’une seule coordonnée de l’espace (\(x, \theta...\)). Il s’agit en général dun mouvement rectiligne ou d’un mouvement de rotation.
3.1.2.1.2.1. Zonnes accessibles et barrière de potentiel#
Important
Zones accessibles
On va s’intéresse ici au cas des systèmes conservatifs : l’énergie mécanique est une constante.
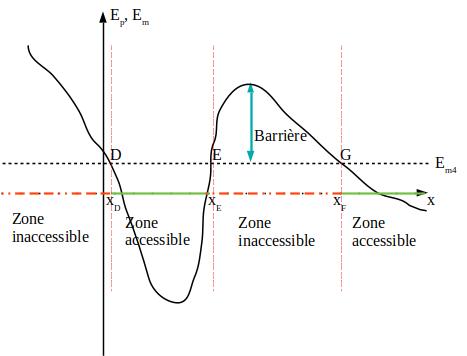
On rappelle la positivité de l’énergie cinétique qui permet d’écrire la condition suivante: un point de coordonnées x est accessible par le système si \(E_p(x) \leq E_m\): l’énergie potentielle est bornée. Cela définit des zones interdites et des zones accessibles.
Dans l’exemple ci-dessus, si le système possède une énergie mécanique égale à \(E_{m4}\), toutes les positions de \(x_D\) à \(x_E\) et les positions de \(x_F\) à l’infini sont accessibles et les autres sont inaccessibles.
Important
Barrière de potentiel
Remarquons que le mobile ne peut passer de la zone DE à la après F. En effet, pour passer de la première zone à la seconde, il faudrait passer par des points entre E et F qui sont inaccessibles par leur trop forte énergie potentielle. On dit qu’il y a une barrière d’énergie potentielle.
Suivant ses conditions initiales, le système sera soit “bloqué” entre D et E, soit entre F et l’infini.
On remarque sur les états précédents deux types d’états très particuliers: des états où le système est confiné dans une portion d’espace (état “entre DE”). On parle d’état lié.
Des états où le système peut s’éloigner indéfiniment (état “supérieur à F”), on parle d’état de diffusion.
Les positions d’équilibre d’un système conservatif sont nécessairement des positions où l’énergie potentielle possède un extremum (ou plus généralement un point d’annulation de la dérivée).
3.1.2.1.3.2. Stabilité des positions des d’équilibre#
Important
Stabilité
Une position d’équilibre est dite stable si, en écartant légèrement le mobile de cette position d’équilibre, il reviendra de lui-même vers la position d’équilibre.
Si la position n’est pas stable, elle est dite instable.
Important
Energie potentielle et stabilité
Si en une position d’équilibre, la dérivée seconde est strictement positive, alors c’est une position d’équilibre stable.
Si en une position d’équilibre, la dérivée seconde est strictement négative, alors c’est une position d’équilibre instable.
Si elle est nulle, on ne peut conclure.
Démonstration
On peut utiliser l’une des deux méthodes énoncées précédemment pour prouver cette propriété. Nous allons ici utiliser la propriété de stabilité des équation différentielle linéaires mais on pourrait très bien utiliser l’analyse du signe de l’accélération (s’entraîner à le faire).
On rappelle que la force s’écrit \(\overrightarrow{F} = - \frac{\rm{d}E_p}{\rm{dx}}(x) \overrightarrow{e_x}\). Pour linéairise le PFD, nous allons développer l’énergie potentielle à l’ordre 2. Il vient:
La dernière équation est stable si la dérivée seconde est positive et instable si la dérivée seconde négative. Si elle est nulle, il faut faire un développement limité à un ordre supérieur. Mais l’équation obtenue n’est pas linéaire, la seule méthode utilisable sera de vérifier le signe de l’accélération.
3.1.2.1.3.3. Petits mouvements autour d’une position d’équilibre stable#
Important
Petits mouvements autour d’une position d’équilibre stable
Autour d’une position d’équilibre stable, le système va rester confiné et se comporte comme un oscillateur harmonique de pulsation propre \(\sqrt{\frac{\frac{\rm{d^2}E_p}{\rm{dt^2}}(x_{eq})}{m}}\).
La preuve est directe à partir de l’équation obtenue précédemment:
\[\begin{align*}
m \ddot x + \frac{\rm{d^2}E_p}{\rm{dx^2}}(x_{eq}) x &= \frac{\rm{d^2}E_p}{\rm{dx^2}}(x_{eq}) x_{eq}
\end{align*}\]