5.1.1. Généralités#
Dans tout le chapitre, le système sera un point matériel noté M.
5.1.1.1. Définition#
Important
Mouvement à force centrale
Un mouvement à force centrale est un mouvement dont la résultante des forces est toujours dirigée vers un même point O fixe dans le référentiel considéré.
On appelle le point O le centre de force car en effet le point O est responsable de la force.
5.1.1.2. Conservation du moment cinétique#
Important
Conservation du moment cinétique
Dans un mouvement à force centrale dont le centre de force est le point O, alors le moment cinétique au point O est une intégrale première du mouvement.
Cela signifie qu’il est constant au cours du mouvement.
Démonstration
On va appliquer au système M le théorème du moment cinétique au point O. La résultante des forces étant portée par la droite OM, son moment en O est nul. Il vient que la dérivée du moment cinétique est nulle: le moment cinétique est donc une constante du mouvement.
Par définition, le moment cinétique dépend de la position et de la vitesse. C’est donc une intégrale première du mouvement.
Important
Conséquence : Planéité du mouvement
Un mouvement à force centrale est un mouvement plan: la trajectoire du mobile est contenu dans le plan passante par le centre de force O et perpendiculaire au moment cinétique.
Démonstration
Nous avons démontré que le moment cinétique était un vecteur constant. Or par définition du moment cinétique, le vecteur position pris au point O est perpendiculaire au moment cinétique. Il vient que le vecteur position est à tout instant perpendiculaire au même vecteur: il est contenu dans le plan passant par O et perpendiculaire au moment cinétique.
Important
Paramétrage
La planéité du mouvement et le caractère centrale de la force explique le choix du paramétrage. Par la suite, on va travailler dans un repère cylindrique centré au point O et d’axe Oz suivant le moment cinétique. On notera le moment cinétique au point O: \(\overrightarrow{L_O} = L_O \overrightarrow{e_z}\).
On peut alors exprimer le moment cinétique dans le système de coordonnées:
On remarquera que le moment cinétique est une donnée constante qui peut être utilisée comme “donnée initiale” comme on le verra par la suite. Son expression montre que l’on relie l’évolution angulaire au rayon. Il vient qu’on par d’un système à 2 degré de liberté (rotation autour de O donné par \(\dot \theta\) et éloignement/rapprochement de O donné par \(r\)) et qu’on lie l’évolution des mouvements. On pourra donc, en introduisant le moment cinétique \(L_O\) éliminer la vitesse angulaire dans les équations.
Important
Conséquence : Loi des aires
Dans un mouvement à force centrale, la vitesse aréolaire, c’est-à-dire l’aire parcourue par le vecteur position par unité de temps est constante.
Démonstration
Durant un temps dt, le mobile passe du point \(M(t)\) au point \(M(t+dt)\). L’aire balayée est donc l’aire du triangle \(OM(t)M(t+dt)\). L’aire de ce triangle s’écrit:
\[\begin{align*} d\mathfrak{A} &= \frac{1}{2} \left\vert \overrightarrow{OM}\wedge\overrightarrow{M(t)M(t+dt)} \right\vert \\ &= \frac{1}{2m} \left\vert \overrightarrow{OM}\wedge m\overrightarrow{v_M}dt \right\vert \\ &= \frac{1}{2m}\left\vert \overrightarrow{L_O} \right\vert dt \\ \frac{\rm{d}\mathfrak{A}}{\rm{dt}} &= \frac{1}{2m} L_O \end{align*}\]Le moment cinétique étant constant, il vient que la vitesse aréolaire est constante. La loi des aires est bien vérifiée.
Important
Constante des aires
On définit la constante des aires comme la grandeur \(C = r^2 \dot\theta\). Dans un mouvement à force centrale, il s’agit évidemment d’une constante et la vitesse aréolaire s’écrit \(\frac{\rm{d}\mathfrak{A}}{\rm{dt}} = \frac{1}{2}C\).
5.1.1.3. Cas conservatifs#
5.1.1.3.1. Généralités#
Important
Force centrale conservatives
Une force centrale conservative ne dépend que de la coordonnées radiale. On peut donc écrire \(\overrightarrow{F} = F(r) \overrightarrow{e_r}\) et l’énergie potentielle associée \(E_p(r)\) est telle que \(F(r) = - \frac{\rm{d}E_p}{\rm{dr}}(r)\).
5.1.1.3.2. Energie potentielle effective#
Important
Expression de l’énergie potentielle effective.
Dans le cadre d’un mouvement à force centrale, on peut réécrire l’énergie mécanique sous la forme:
où l’énergie potentielle effective a pour expression:
où \(C\) est la constante des aires et \(L_O\) est la composante du moment cinétique.
5.1.1.3.3. Analyse semi-qualitatives#
5.1.1.3.3.1. Positivité de l’énergie cinétique#
On rappelle que l’énergie cinétique radiale est nécessairement positive ou nulle. Cela permet de déterminer des zones accessibles. Nous allons préciser ici ce principe en remarquant que les zones accessibles sont un peu particulières. Ici le système est à deux degrés de liberté: sa position radiale et sa position angulaire.
Important
Zones accessibles
Les zones où \(E_{p,eff}(r) > E_m\) sont inaccessibles. Cela correspond à des rayons inaccessibles soit à des zones limitées par des cercles.. Les zones accessibles et inaccessibles sont dont définies comme des zones comprises entre des cercles de centre O où \(E_ {p,eff}(r) = E_m\).
Si la trajectoire est limitée par un rayon maximal, l’état sera lié.
Si la trajectoire n’est pas limitée par un rayon maximal, l’état sera de diffusion.
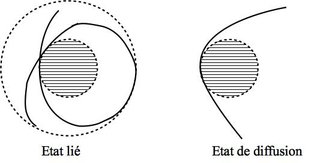
Les rayons extrêmes atteints seront données par l’équation \(E_{p,eff} = E_m\). De même, le mobile ne peut change la variation de r (passer d’éloignement à rapprochement ou inversement) qu’aux position extrêmes car ce sont les positions où la vitesse radiale s’annule. La trajectoire est y est tangente au cercle.
5.1.1.3.3.2. Caractéristiques autres#
Important
Minimum d’énergie potentielle effective
Le minimum d’énergie potentielle effective ne correspond pas à une position d’équilibre possible du système. On rappelle que le moment cinétique est non nul, donc il y a toujours le mouvement de rotation.
Au minimum d’énergie potentielle effective, la vitesse n’est pas non plus maximale (cf. remarque précédente). Seule la vitesse radiale y est maximale.
Par contre, si l’énergie mécanique égale la valeur minimale de l’énergie potentielle effective, alors un seul rayon est accessible: la trajectoire sera donc un cercle.