6.1.2.4. Types d’actions#
On distinguera deux types d’actions:
les actions à distance : en général associées à des actions ponctuelles usuelles comme la gravitation, la pesanteur ou l’interaction électromagnétique. Elles agissent en volume (intégration volumique)
les actions de contact : résultante d’actions ponctuelles microscopiques de courte distance (Van der Waals principalement), elles n’ont en général pas d’expression connues (sauf cas de non frottements) mais peuvent contraindre de le mouvement. On parle de liaison.
6.1.2.4.1. Actions à distances#
Important
Action de la pesanteur
Cas d’un champ de psanteur uniforme. L’action de la pesanteur sur un corps a alors :
pour force résultante \(\overrightarrow{P} = M\overrightarrow{g}\)
un moment résultant nul en un point appelé centre de gravité. Il est confondu avec le centre d’inertie pour un champ uniforme.
6.1.2.4.2. Actions de contact#
Les actions de contact sont en général surfacique: on va sommer les actions ponctuelles en surface (double intégale) en se restreignant évidemment à la surface de contact ! On ne cherchera pas à calculer ces intégrales. L’expression des caractéristiques de ces actions de contacts se fait de deux manières (cf. en ligne).
Important
Rappel : Composante tangentielle et composante normale
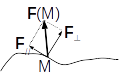
En un point de contact M entre le système et le solide/fluide (qu’on appellera \(\Sigma_{ext}\)), l’action ponctuelle (modélisée par la force \(\overrightarrow{F}(M)\) peut-être décomposée en deux composantes):
une composante normale à la surface de contact \(\overrightarrow{F_{\perp}}(M)\)
une composante tangentielle à la surface de contact \(\overrightarrow{F_{//}}(M)\)
Il n’y a pas d’expression simple a priori de cette action ponctuelle qui dépend de la géométrie au point de contact mais aussi du reste du contact, des autres actions qui s’appliquent sur les deux systèmes, de la nature des matériaux qui forment le système…
On peut néanmoins obtenir plusieurs informations sur la force et moment résultant de l’action globale suivant les cas (solide ou fluide, géométrie du contact… ). C’est ce que nous ferons par la suite.
6.1.2.4.2.1. Action d’un fluide#
6.1.2.4.2.1.1. Modélisation de l’action d’un fluide (en ligne)#
6.1.2.4.2.1.2. Expression de la force de frottements fluides#
Important
Force de frottements fluide
Cas laminaire : Aux faibles vitesses, la force ou le moment résultant de frottements fluides est proportionnelle à la vitesse du fluide.
Pour un système en translation : \(\overrightarrow{F} = - \lambda \overrightarrow{v_{systeme/fluide}}\).
Dans le cas d’un système en rotation au tour d’un axe fixe : \(M_{axe}(fluide) = - K \dot \theta\) où \(\dot \theta\) est la vitesse angulaire du solide autour de l’axe (fluide supposé au repos)
Cas turbulent : Aux fortes vitesses, la force de frottements fluides est proportionnelle au carré de la vitesse du fluide: \(\overrightarrow{F} = -k \left \| v\right \| \overrightarrow{v}\). Cette expression est valable pour un système en translation. Le cas d’un système en rotation ne sera pas traité.
6.1.2.4.2.2. Action de contact solide#
6.1.2.4.2.2.1. Lois phénoménologiques de Coulomb#
Il n’y a pas de modèle théorique complet permettant de déterminer les actions de contact solide. Il existe par contre une loi phénoménologique (déduite de l’expérience) qui permet de les modéliser. Plus précisément, on va, au niveau des actions ponctuelles, relier la composante normale et la composante tangentielle.
Important
Rappel : Lois phénoménologiques de Coulomb
En un point de contact solide-solide, la force de contact \(\overrightarrow{R}\) se décompose en deux composantes, l’une tangentielle \(\overrightarrow{R_T}\) et l’autre normale \(\overrightarrow{R_N}\) (\(\overrightarrow{R} = \overrightarrow{R_N} + \overrightarrow{R_T}\)). On déduit expérimentalement les comportements suivants:
La composante normale est telle qu’elle empêche l’interpénétration des systèmes (contrainte cinématique). Elle est dirigée vers l’intérieur du solide qui subit l’action. Son annulaion signifie la perte de contact.
La composante tangentielle a un comportement qui dépend de l’état relatif des deux solides:
en cas d’immobilité relative des deux solides, l’action complète est telle qu’elle permet l’immobilité relative (somme des forces nulle ET somme des moments nuls si l’on est dans un référentiel galiléen). La composante tangentielle est de norme nécessairement inférieure à \(\left \| \overrightarrow{R_T}\right \| < \mu_S \left \| \overrightarrow{R_N}\right \|\) où \(\mu_S\) est appelé coefficient de frottement statique. Lorsque cette condition est mise en défaut, alors le système se met en mouvement.
en cas de mouvement relatif des deux solides (on dit qu’il y a glissement au point M), la composante tangentielle s’oppose à la vitesse relative au point M. Sa norme est égale à \(\left \| \overrightarrow{R_T}\right \| = \mu_D \left \| \overrightarrow{R_N}\right \|\) où \(\mu_D\) est appelé coefficient de frottement dynamique.
Quelque soit le système, \(\mu_D < \mu_S\), c’est-à-dire qu’il est plus facile de maintenir un solide en mouvement par rapport à un autre solide malgré les frottements que de mettre en mouvement le même solide.
Attention
Les relations précédentes ne concernant a priori que les forces ponctuelles. Le passage aux actions globales dépend de la géométrie de la liaison.
6.1.2.4.2.2.2. Liaisons normalisée et géométrie#
Liaisons normalisée En général, on travaille avec des géométries simples et usuelles pour les surfaces de contact. On parle de liaison normalisée (celle présentée précédemment est la liaison rotule ou sphérique). Ces liaisons ont été vues en SI. En physique les seules à connaître sont la liaison pivot et la liaison glissière.
6.1.2.4.2.2.2.1. Liaison glissière#
Cette liaison ne permet au mobile qu’un mouvement de translation. Dans ces cas là, on s’intéresse alors principalement à la résultante des forces et pas au moment. Ce dernier est donc souvent inconnu (pas nul) sans que cela soit un problème.
Au niveau de la force, on distingue alors la composante tangentielle des composantes normales. On peut alors utiliser, suivant les problèmes, l’hypothèse de non frottements ou les lois de Coulomb.
Des éléments communs concernant la résultante des forces s’obtiennent pour une liaison plan-plan (on a par contre deux composantes tangentielles et une composante normale).
6.1.2.4.2.2.2.2. Liaison pivot#
Important
Liaison pivot
La liaison pivot est une liaison où le seul degré de liberté est la rotation entre les deux solides. Elles est réalisée par une surface de contact cylindrique (qui permet une rotation suivant UN axe) fermé latéralement (pour empêcher la translation suivant l’axe de rotation).
En physique, on travaille en générale avec un solide mobile (le rotor) en liaison pivot avec le bati (stator - en général le référentiel associé au bati est un référentiel galiléen en physique).
Important
Liaison pivot parfaite
Une liaison pivot parfaite est une liaison pivot sans frottements, le moment résultant de la liaison sur l’axe de rotation est nulle.
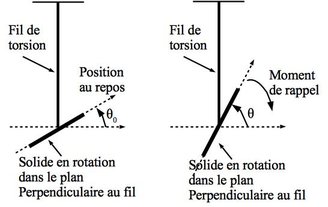
6.1.2.4.2.2.3. Action d’un fil de torsion#
Fil de torsion Un fil de torsion est un fil dont la section n’est pas négligeable et qui peut se tordre suivan son axe. Son élasticité implique qu’il va tendre à se détendre exerçant pour cela un moment à ses extrémités proportionnel à l’angle de torsion.
Important
Action d’un fil de torsion
Soit un fil pouvant se tordre suivant son axe. On suppose qu’il ne flambe pas. Pour un angle de torsion \(\theta - \theta_0\) du fil, ce dernier exerce à ses extrémités une action dont le moment suivant l’axe de torsion est:
où C est appelée constante de torsion du fil.
On remarquera qu’une telle action est sembable à une action de rappel élastique. Pour le ressort, le rappel se fait suivant ue translation. Ici le rappel concerne une rotation.
L’angle \(\theta\) repère la torsion du fil. La présence de l’angle \(\theta_0\) permet de placer l’origine des angles en un point où le fil est déjà tordu. Cela peut-être utile lorsque l’on étudie plusieurs fil de torsion.
On parle de moment de rappel ou par abus de langage de couple de rappel.