2.1.1.3. Action ponctuelle: Modélisation et typologie#
2.1.1.3.1. Modélisation mathématique#
Important
Modélisation d’une action ponctuelle
Soit une action ponctuelle \(\mathfrak{A}_{1 \to 2}\) d’un système \(\Sigma_1\) sur un système \(\Sigma_2\). On modélise mathématiquement cette action par deux caractéristiques:
sa force \(\overrightarrow{F}(\mathfrak{A}_{1 \to 2})\) (noté souvent simplement \(\overrightarrow{F}\)) qui donne la direction et le sens vers laquelle l’action tend à entraîner le système et avec quelle intensité elle tend à entraîner le système.
son point d’application.
Par principe physique, les caractéristiques d’une action sont indépendantes du référentiel considéré.
Attention
La force \(\overrightarrow{F}\) donne la direction et le sens vers laquelle l’action tend à entraîner le système mais cela ne veut pas dire que le sytème va aller dans sa direction. Son inertie peut lui permettre de continuer dans une autre direction. Il sera simplement dévié/ralenti (plus ou moins fortement suivant son inertie et l’intensité de la force).
Exemple: Un objet lancé vers le haut subit l’action de la pesanteur dirigée vers le bas mais il continue à monter (en étant par contre ralenti).
2.1.1.3.2. Moment d’une action#
2.1.1.3.2.1. Définition#
Important
Moment d’une action ponctuelle par rapport à un point.
Soit une action ponctuelle \(\mathfrak{A}_{1 \to 2}\) d’un système \(\Sigma_1\) sur un système \(\Sigma_2\) modélisée par une force \(\overrightarrow{F_{ext \to A}}\) et un point d’application A.
Soit un point B arbitraire de l’espace. On définit le moment \(\overrightarrow{M_B}(\mathfrak{A}_{1 \to 2})\) de l’action \(\mathfrak{A}_{1 \to 2}\) par rapport au point B par:
Important
Moment d’une action ponctuelle/force par rapport à un axe.
Soit une action ponctuelle \(\mathfrak{A}_{1 \to 2}\) d’un système \(\Sigma_1\) sur un système \(\Sigma_2\) modélisée par une force \(\overrightarrow{F}\) et un point d’application A.
Soit un axe arbitraire \(\Delta\) orienté par un vecteur unitaire \(\overrightarrow{u_{\Delta}}\). On définit le moment \(M_{\Delta}(\mathfrak{A}_{1 \to 2})\) de l’action \(\mathfrak{A}_{1 \to 2}\) par rapport à l’axe \(\Delta\) par:
où B est un point de l’axe \(\Delta\).
Attention
Ne pas confondre moment d’une action et moment cinétique. Ils n’ont même pas la même unité.
2.1.1.3.2.2. Moment d’une action: Interprétation (en ligne)#

Important
Interprétation
On retiendra que le moment d’une action sur un axe \(\Delta\) donne la tendance qu’à cette action à faire tourner le système autour de l’axe. Il donne par son signe le sens dans lequel cette tendance se fait.
Attention
Il s’agit d’une tendance pour l’action considéré. (notion d’inertie)
Cela ne veut pas dire que le système est en rotation autour de l’axe, il peut même être immobile (les considérations sur les moments sont très important en statique des systèmes de points).
Comme pour la force, le moment donne une tendance qui sera réalisée ou non suivant l’existence d’autres actions/contraintes et suivant l’inertie et le mouvement initial du système.
2.1.1.3.3. Actions ponctuelles usuelles#
Nous allons présenter ici les actions usuelles dont les caractéristiques des forces doivent être connues. Il s’agit pour la plupart d’action ponctuelle s’exerçant sur des points matériels, il ne sera donc en général pas précisé le point d’application parce qu’il est alors évident.
2.1.1.3.3.1. Actions à distance#
2.1.1.3.3.1.1. Force de Lorentz#
Important
Force de Lorentz
Soit un point matériel M chargé de charge q et un champ électromagnétique donc les expressions vectorielles au point M sont \(\overrightarrow{E}(M)\) et \(\overrightarrow{B}(M)\). Alors le champ électromagnétique exerce une action dont la force, appelée force de Lorentz s’écrit:
où \(\overrightarrow{v_{M/\mathfrak{R}}}\) est la vitesse du point M dans le référentiel d’étude.
2.1.1.3.3.1.2. Forces newtoniennes#
Important
Interactions gravitationnelles
Soit deux points matériels \(M_1\) et \(M_2\) de masses respectives \(m_1\) et \(m_2\). Les deux masses sont en interaction dites gravitationnelles. L’action de \(M_1\) sur \(M_2\) est modélisée par une force dirigée de \(M_2\) vers \(M_1\) dont l’expression est:
où G est la constante de gravitation universelle dont l’expression est \(G = 6.67 \times 10^{-11} \rm{m^{3}.kg^{-1}.s^{-2}}\).
Dans la seconde expression, r est la distance \(M_1 M_2\) et \(\overrightarrow{u_{1 \to 2}}\) est le vecteur unitaire porté par la droite orientée de \(M_1\) vers \(M_2\).
Important
Champ de gravitation
Soit un point \(M_1\) de masse \(m_1\). On dit que le point \(M_1\) créé dans tout point P de l’espace un champ de gravitation \(\overrightarrow{\mathfrak{G}_{M_1}}(P)\) dont l’expression est:
Si l’on place en un point P un point matériel \(M_2\) de masse \(m_2\), alors le point \(M_2\) subira une action gravitationnelle de la part de \(M_1\): \(\overrightarrow{F_{grav,1 \to 2}} = m_2 \overrightarrow{\mathfrak{G}_{M_1}}(P = M_2)\).
Important
Interactions coulombiennes (ou électrostatiques)
Soit deux points matériels \(M_1\) et \(M_2\) chargés de charges respectives \(q_1\) et \(q_2\). Les deux charges sont en interaction dites coulombiennes. L’action de \(M_1\) sur \(M_2\) est modélisée par une force portée par la droite \(M_1 M_2\) dont l’expression est:
où \(\epsilon_0\) est la permittivité électrique du vide dont l’expression est \(\epsilon_0 = 8.85 \times 10^{-12} \rm{s^{4}.A^{2}.kg^{-1}.m^{-3}}\) soit \(\frac{1}{4 \pi \epsilon_0} = 8.99 10^{9} S.I.\).
Dans la seconde expression, r est la distance \(M_1 M_2\) et \(\overrightarrow{u_{1 \to 2}}\) est le vecteur unitaire porté par la droite orientée de \(M_1\) vers \(M_2\).
Important
Champ électrique
Soit un point \(M_1\) de charge \(q_1\). On dit que le point \(M_1\) créé dans tout point P de l’espace un champ électrique \(\overrightarrow{E_{M_1}}(P)\) dont l’expression est:
Si l’on place en un point P un point matériel \(M_2\) de charge \(q_2\), alors le point \(M_2\) subira une action coulmbienne de la part de \(M_1\): \(\overrightarrow{F_{grav,1 \to 2}} = q_2 \overrightarrow{E_{M_1}}(P = M_2)\).
2.1.1.3.3.1.3. Pesanteur sur un point matériel#
Important
Champ de pesanteur
A la surface de la Terre, tout corps massique est attiré vers “le bas” par une action appelée poids. Pour un point matériel M de masse m, la force qui s’applique s’écrit \(\overrightarrow{P} = m \overrightarrow{g}\) où \(\overrightarrow{g}\) est le champ de pesanteur au point M. Il est dirigé vers “le bas” (en réalité, il permet de définir la verticale (principe du fil à plomb)).
2.1.1.3.3.2. Actions de contact#
2.1.1.3.3.2.1. Tension d’un fil#
Important
Tension d’un fil ou d’une tige rigide.
La tension d’un fil ou d’une tige rigide est l’action qu’exerce un fil/une tige sur un système accroché au fil/à la tige (c’est une action de contact). Dans le cas d’un fil/une tige fin(e) dont la torsion n’a pas d’influence (ou qui ne se tord pas), on peut assimiler cette action à une action ponctuelle.
La force exercée par le fil/la tige n’a pas d’expression connue a priori mais on sait que dans le cas d’un fil, elle est alors nécessairement vers le fil et non vers le système accroché (un fil ne peut que tirer le système). Pour une tige, la force peut être dans les deux directions.
Important
Cas d’une fil/d’une tige parfaite Un fil/une tige parfaite est un fil/tige sans masse. Dans ce cas la tension exercée en chaque point du fil/tige sur l’autre partie du fil est la même en tout point du fil/tige est égale à la tension exercée à chaque extrémité du fil/tige sur les systèmes accrochée. De plus la tension du fil/tige est alors tangente au fil/tige.
2.1.1.3.3.2.2. Action d’un ressort: Force de rappel élastique#
Important
Action d’un ressort
Soit un système accroché à un ressort. En général, on considère le point d’accroche comme ponctuel et la force exercée par le ressort à son extrémité sur le système comme tangente au ressort. Si le ressort est de masse négligeable (cas usuel), alors la force exercée par le ressort sur un système accroché à son extrémité s’écrit si sa longueur est l:
où \(l_0\) est la longueur à vide du ressort, k sa raideur et \(\overrightarrow{u_{ext}}\) un vecteur unitaire tangent à l’axe de ressort et dirigé vers l’extérieur du ressort.
\(\Delta l = l - l_0\) est appelé allongement du ressort.
2.1.1.3.3.2.3. Contact solide et contact fluide#
Important
Composante tangentielle et composante normale
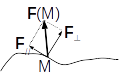
En un point de contact M entre le système et le solide/fluide (qu’on appellera \(\Sigma_{ext}\)), l’action ponctuelle (modélisée par la force \(\overrightarrow{F}(M)\)) peut-être décomposée en deux composantes:
une composante normale à la surface de contact \(\overrightarrow{F_{\perp}}(M)\)
une composante tangentielle à la surface de contact \(\overrightarrow{F_{//}}(M)\)
Important
Action d’un fluide L’action d’un fluide sur un point matériel est modéliée par une action de frottements fluides qui s’oppose à la vitesse. On distingue deux cas:
Cas laminaire : Aux faibles vitesses, l’écoulement est dit laminaire et la force de frottement fluide est proportionnelle à la vitesse par rapport au fluide.
Cas turbulent : Aux fortes vitesses, l’écoulement est dit turbulent et la force de frottement fluide est proportionnelle au carré de la vitesse par rapport au fluide.
Important
Actions d’un solide : Lois phénoménologiques de Coulomb
En un point de contact solide-solide, la force de contact \(\overrightarrow{R}\) se décompose en deux composantes, l’une tangentielle \(\overrightarrow{R_T}\) et l’autre normale \(\overrightarrow{R_N}\) (\(\overrightarrow{R} = \overrightarrow{R_N} + \overrightarrow{R_T}\)). On déduit expérimentalement les comportements suivants:
La composante normale est telle qu’elle empêche l’interpénétration des systèmes (contrainte cinématique). Elle est dirigée vers l’intérieur du solide qui subit l’action. Son annulaion signifie la perte de contact.
La composante tangentielle a un comportement qui dépend de l’état relatif des deux solides:
en cas d’immobilité relative des deux solides, l’action complète est telle qu’elle permet l’immobilité relative. La composante tangentielle est de norme nécessairement limitée par l’inégalité
\[ \left \| \overrightarrow{R_T}\right \| < \mu_S \left \| \overrightarrow{R_N}\right \| \]où \(\mu_S\) est appelé coefficient de frottement[1] statique. Lorsque cette condition est mise en défaut, alors le système se met en mouvement.
en cas de mouvement relatif des deux solides (on dit qu’il y a glissement au point M), la composante tangentielle s’oppose à la vitesse relative au point M. Sa norme est égale à \(\left \| \overrightarrow{R_T}\right \| = \mu_D \left \| \overrightarrow{R_N}\right \|\) où \(\mu_D\) est appelé coefficient de frottement dynamique.
Quelque soit le système, \(\mu_D < \mu_S\), c’est-à-dire qu’il est plus facile de maintenir un solide en mouvement par rapport à un autre solide malgré les frottements que de mettre en mouvement le même solide.
Attention
Il faut faire attention à plusieurs points:
la condition d’immobilité est une inéquation. Elle ne permet PAS de déterminer la force ou le moment de l’action. Ces derniers se détermine par application des théorèmes fondamentaux dans un cas statique (immobilité relative des deux solides).
Dans tous les cas, la composante normale se déduit de la contrainte cinématique imposée.
La condition de contact est importante pour déterminer s’il y a décollement.
Il faut faire attention à l’orientation de la composante tangentielle qui change en fonction de la vitesse uniquement lorsqu’il y a glissement. Cela signifie
qu’on doit souvent faire l’étude du mouvement par phase en fonction du sens de déplacement.
que dans le cas de non glissement, on ne peut a priori orienter la composante tangentielle.