Caractéristiques d’un système d’ordre 2
Contents
Caractéristiques d’un système d’ordre 2#
Système d’ordre 2: Forme canonique#
Important
Forme canonique des systèmes d’ordre 2
L’équation différentielle qui régit l’évolution d’un système d’ordre 2 peut se mettre une des formes suivantes:
On appelle
\(Q\): le facteur de qualité du système
\(\xi\): le coefficient d’amortissement du système
\(\omega_0\): la pulsation propre du système
Important
Type de régimes
La forme mathématique correspondant à la solution dépend de la valeur du facteur de qualité Q (ou du coefficient d’amortissement \(\xi\)) car ce dernier influe sur la valeur du discriminant de l’équation caractéristique \(\Delta\). A chaque expression différente correspond un type de régime:
\(\Delta\) |
Q |
\(\xi\) |
Forme ESSM |
|
|---|---|---|---|---|
Régime apériodique |
> 0 |
< 1/2 |
> 1 |
\(A \exp{r_1 t} + B \exp{r_2 t}\) |
Régime critique |
= 0 |
= 1/2 |
= 1 |
\(\exp{r_0 t} \left ( A t + B\right )\) |
Régime pseudo-périodique |
< 0 |
> 1/2 |
< 1 |
\(\exp{\lambda t} \left ( A \cos(\Omega t ) + B \sin(\Omega t ) \right )\) |
On rappelle que :
\(r_1\) et \(r_2\) sont les solutions de l’équation caractéristiques
\(r_0\) est la solution double lorsque le discriminant est nul
\(\lambda\) et \(\Omega\) sont respectivement la partie réelle de \(r_1\) et \(r_2\) et la partie imaginaire (en valeur absolue) de \(r_1\) et \(r_2\) lorsque le discriminant est négatif. On appelle \(\Omega\) la pseudo-pulsation du système.
Différents régimes de fonctionnement#
Régime apériodique#
Solution de l’équation homogène
On rappelle que la solution de l’équation homogène dans le cas où \(\Delta > 0\), c’est-à-dire \(Q < 1/2\) (ou \(\xi > 1\) est:
avec:
Analyse des expressions
Remarquons que dans le cas où les coefficients sont positifs, les deux racines sont négatives: on retrouve le principe de stabilité du système.
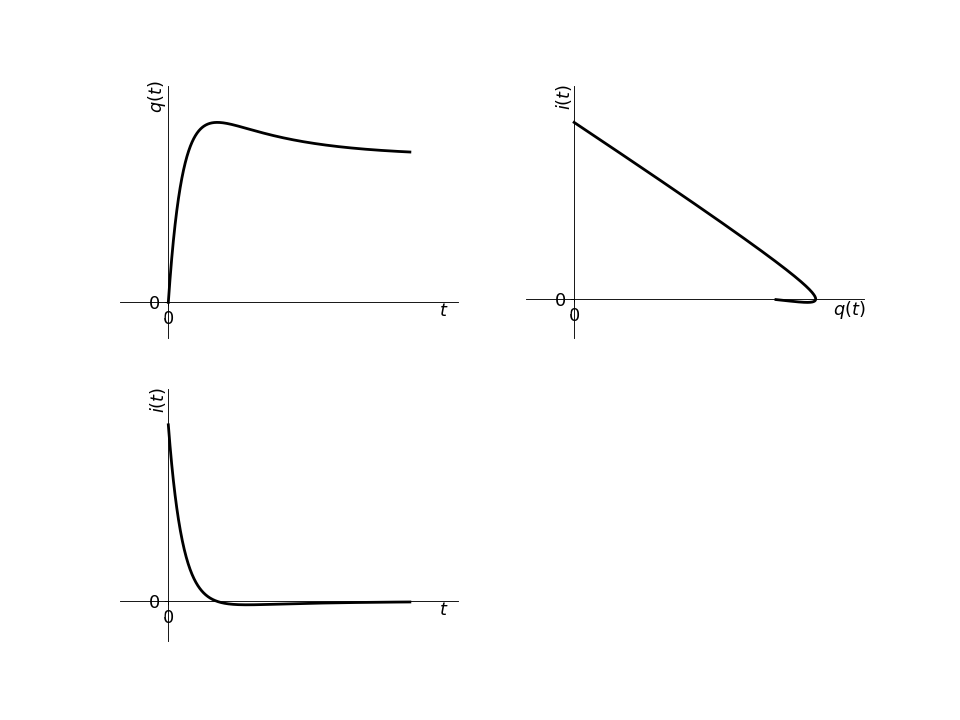
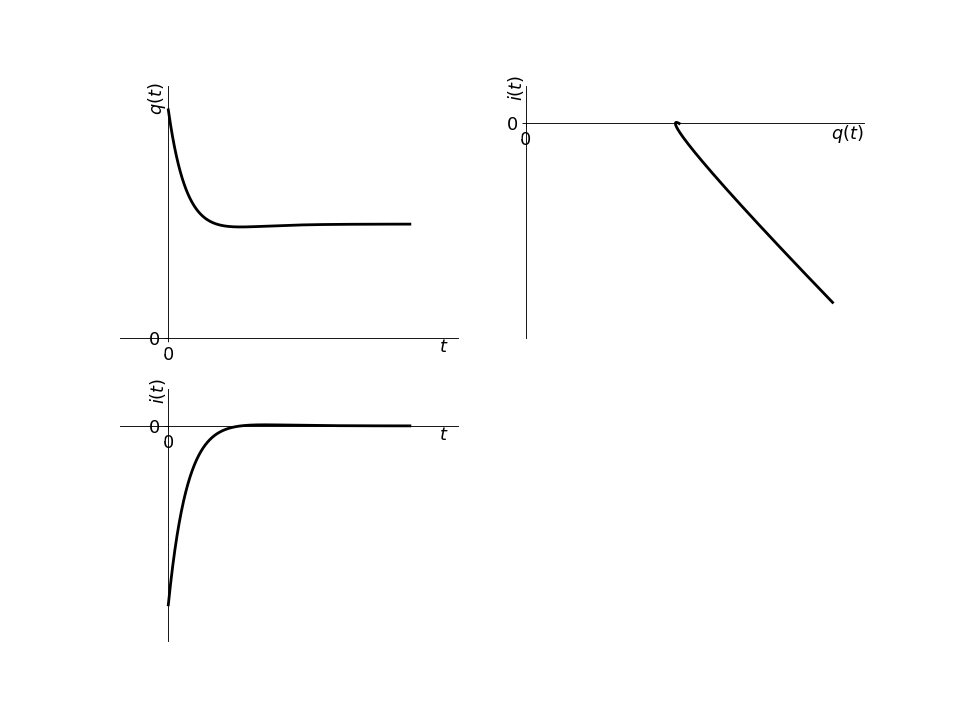
Tracés temporels et portrait de phase
Régime critique#
Solution de l’équation homogène
On rappelle que la solution de l’équation homogène dans le cas où \(\Delta = 0\), c’est-à-dire \(Q = 1/2\) (ou \(\xi = 1\) est:
avec:
Analyse des expressions
Remarquons que dans le cas où les coefficients sont positifs, la racine double est négative: on retrouve le principe de stabilité du système.
Tracés temporels et portrait de phase
Remarquons qu’il y a beaucoup de similarités avec le régime apériodique en terme de tracé. Pris séparément, on ne peut pas savoir si un tel tracé vient d’un régime apériodique ou critique.
Nous verrons en activité un moyen de comparer les deux tracés (quand on a les deux).
Régime pseudo-périodique#
Solution analytique#
Solution de l’équation homogène
On rappelle que la solution de l’équation homogène dans le cas où \(\Delta < 0\), c’est-à-dire \(Q > 1/2\) (ou \(\xi < 1\) est:
avec:
Analyse des expressions
Remarquons que dans le cas où les coefficients sont positifs, le coefficient de l’exponentielle (issue de la partie réelle des racines) est négatif: on retrouve le principe de stabilité du système.
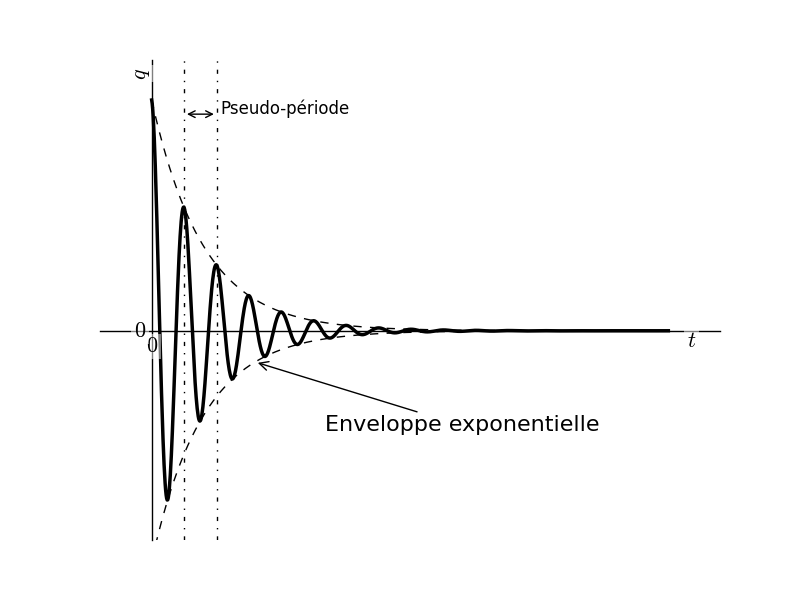
Tracé temporelle#
Tracé temporelle
L’expression \(X(t) = \exp^{-\lambda t}\left( D \sin^{\Omega t + \phi} \right)\) permet de dessiner facilement l’évolution de X(t) en régime pseudo-périodique.
En effet, on remarque qu’il s’agit d’un signal sinsoïdal de pulsation \(\Omega\) ou plutôt pseudo-sinusoïdal car l’amplitude décroît de manière exponentielle.
Pour représenter X(t), il faut d’abord représenter son enveloppe exponentielle: \(D \exp^{- \frac{\omega_0 t}{2Q}}\). On représente alors à l’intérieur de l’enveloppe un sinusoïde (dont l’amplitude décroît) de pseudo-période \(T = \frac{2 \pi}{\Omega}\).
Régime pseudo-périodique: Décrément logarithmique#
Important
Décrément logarithmique.
Pour un régime pseudo-périodique de pseudo-période T, on définit le décrément logarithmique \(\delta\) par:
Interprétation
On calcule l’écart à la valeur finale à deux instants t et t+T (ce second écart est plus faible pour un système stable). En faisant le rapport, on obtient un nombre d’autant plus grand que l’amortissement est fort. Le décrément est donc une mesure l’amortissement en régime pseudo-périodique.
Le fait que la décroissance soit exponentielle explique que l’on prenne le logarithmique du rapport. Nous allons voir que cela simplifie l’expression.
Important
Relation entre le décrément logarithmique et le facteur de qualité On peut montrer que (‘sentraîner à le faire - correction en ligne):
$\( \delta = \frac{2\pi}{\sqrt{4Q^2 - 1}} \)$\end{basic}
Démonstration
soit :
soit :
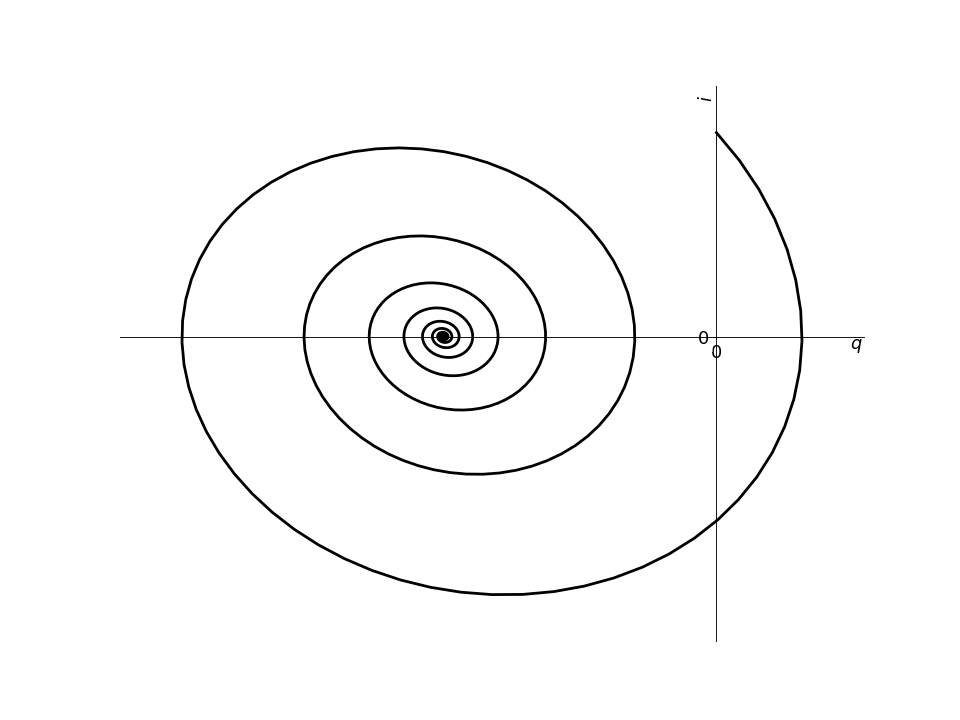
Portrait de phase (en ligne)#
Allure du portrait de phase
Le portrait de phase en régime pseudo-périodique est une spirale elliptique convergeant vers le régime forcé.
Si l’on représente la dérivée \(\dot X(t)\) en fonction de la fonction X(t), la spirale tourne dans le sens horaire.