Applcations : Géométrie vectorielle
Contents
Applcations : Géométrie vectorielle#
Théorème d’Al Kashi#
Exercice
Démontrer le théorème d’Al Kashi à l’aide de la géométrie vectorielle.
Géométrie vectorielle#
Exercice
On considère la figure suivante. On note \(\overrightarrow{\Omega} = \Omega \overrightarrow{z}\) et \(\alpha\) est un angle fixe.
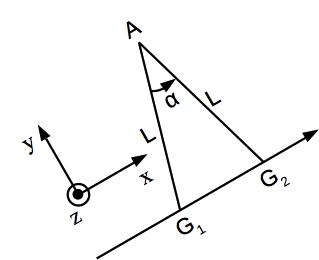
Déterminer les expressions des vecteurs \(\overrightarrow{G_1 A}\) et \(\overrightarrow{G_2 A}\)
Déterminer les expressions des vecteurs \(\overrightarrow{v_A} = \overrightarrow{\Omega} \wedge \overrightarrow{G_1 A}\) et \(\overrightarrow{v_2} = \overrightarrow{\Omega} \wedge \overrightarrow{G_1 G_2}\).
Représenter graphiquement \(\overrightarrow{v_1}\) et \(\overrightarrow{v_2}\) (on fera surtout attention à la direction et au sens du vecteur).
Angles d’Euler#
Exercice
On considère un repère cartésien \(\mathfrak{R_1}\) \((O, \overrightarrow{e_{x1}}, \overrightarrow{e_{y_1}}, \overrightarrow{e_{z_1}})\). On définit trois autres repères cartésiens:
le repère \(\mathfrak{R_2}\) \((O, \overrightarrow{e_{x2}}, \overrightarrow{e_{y_2}}, \overrightarrow{e_{z_1}})\) obtenu par rotation de \(\mathfrak{R_1}\) d’un angle \(\theta\) autour de \(\overrightarrow{z_1}\)
le repère \(\mathfrak{R_3}\) \((O, \overrightarrow{e_{x3}}, \overrightarrow{e_{y_2}}, \overrightarrow{e_{z_3}})\) obtenu par rotation de \(\mathfrak{R_2}\) d’un angle \(\phi\) autour de \(\overrightarrow{y_2}\)
le repère \(\mathfrak{R_4}\) \((O, \overrightarrow{e_{x3}}, \overrightarrow{e_{y_4}}, \overrightarrow{e_{z_4}})\) obtenu par rotation de \(\mathfrak{R_3}\) d’un angle \(\psi\) autour de \(\overrightarrow{x_3}\)
Représenter sur un schéma les quatres repères. Commenter la difficulté de raisonner sur un tel schéma.
Représenter des plans de coupe d’axe perpendiculaire \(\overrightarrow{z_1}\), puis \(\overrightarrow{y_2}\) puis \(\overrightarrow{x_3}\). Représenter pour chaque coupe les vecteurs des repères contenus dans ces plans et les angles \(\phi, \theta, \psi\) lorsqu’ils apparaissent.
Soit un point A de coordonnées \((x_4,y_4,z_4)\) dans \(\mathfrak{R_4}\), exprimer le vecteur \(\overrightarrow{OA}\) dans le repère \(\mathfrak{R_1}\) en fonction de \(x_4,y_4,z_4,\phi,\theta\) et \(\psi\).