Géométrie dans l’espace
Contents
Géométrie dans l’espace#
Tout ce qui a été dit en introduction reste vrai et nous allons voir que de nombreuses propriétés du plan restent vraies. On pourra ainsi redéfinir les coordonnées cartésiennes en rajoutant simplement la troisième coordonnée (z suivant un vecteur \(\overrightarrow{e_z}\)).
Angle orienté#
Lorsqu’on s’intéresse à l’orientation des angles, on ne peut plus définir de “sens trigonométrique” (tout dépend de quel coté on regarde le plan!).
Important
Orientation d’un plan
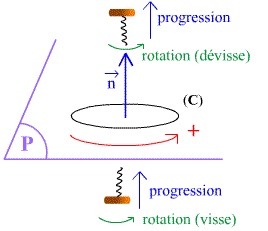
Soit un plan \((\Pi)\) de l’espace, on oriente le plan par un vecteur normal au plan \(\overrightarrow{n}\). Les angles sont alors orientés en cohérence avec le vecteur normal \(\overrightarrow{n}\), c’est-à-dire:
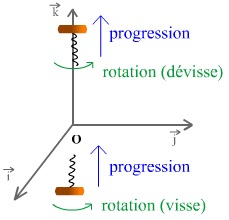
Règle du tire-bouchon: Un tire-bouchon se vissant dans le sens de \(\overrightarrow{n}\) tourne dans le sens des angles de \((\Pi)\) comptés positivement.
Règle de la main droite: Si l’on place le majeur de la main droite dans le sens de \(\overrightarrow{n}\), les angles allant du pouce vers l’index sont comptés positivement.
Base directe et produit vectoriel#
Base directe#
Important
Trièdre directe
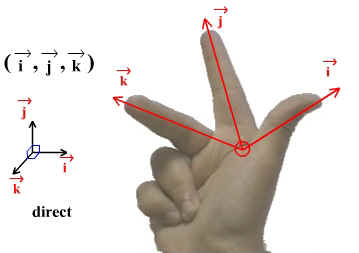
Soit trois vecteurs de l’espace \((\overrightarrow{i}, \overrightarrow{j}, \overrightarrow{k})\) de sorte qu’aucun ne soit colinéaire à un autre vecteur du triplet, on dit qu’ils forme un trièdre directe si:
règle de la main droite: l’on peut superposer simultanément \(\overrightarrow{i}\) au pouce de la main droite, \(\overrightarrow{j}\) à l’index de la main droite et \(\overrightarrow{k}\) au majeur de la main droite.
règle du tire-bouchon: un tire-bouchon vissant dans le sens de \(\overrightarrow{i}\) amène \(\overrightarrow{j}\) sur \(\overrightarrow{k}\) en un quart de tour (et pas trois quart de tour)
En physique, on travaillera toujours avec des bases orthonormées directes.
Produit vectoriel#
Produit vectoriel
Soit deux vecteurs \(\overrightarrow{u_1}\) et \(\overrightarrow{u_2}\), on définit le produit vectoriel \(\overrightarrow{u_1} \wedge \overrightarrow{u_2}\) comme le vecteur \(\overrightarrow{w}\) tel que:
\(\left \| \overrightarrow{w} \right \|= \left \| u_1 \right \| \left \| u_2 \right \| \vert \sin (\overrightarrow{u_1} ; \overrightarrow{u_2}) \vert\)
Le vecteur \(\overrightarrow{w}\) est perpendiculaire au plan \((\Pi)\) formé par les vecteurs \(\overrightarrow{u_1}\) et \(\overrightarrow{u_2}\).
Le sens de \(\overrightarrow{w}\) est tel que le trièdre \((\overrightarrow{u_1}; \overrightarrow{u_2}; \overrightarrow{w})\) est direct.
Important
Propriété d’un produit vectoriel
Bilinéarité du produit vectoriel
Antisymétrie: \(\overrightarrow{u} \wedge \overrightarrow{v} = - \overrightarrow{v} \wedge \overrightarrow{u}\)
Si \(\overrightarrow{u}\) et \(\overrightarrow{v}\) sont deux vecteurs colinéaires, leur produit vectoriel est nul. En particulier, le produit vectoriel d’un vecteur par lui-même est nul.
Ces propriétés sont fondamentales pour le calcul d’un produit vectoriel.
Important
Vecteur d’une base orthonormée direct Considérons \((\overrightarrow{e_x}, \overrightarrow{e_y}, \overrightarrow{e_z})\) une base orthonormée directe. On a:
Méthode: Calculer un produit vectoriel#
Nous allons voir ici comment calculer un produit vectoriel.
Exercice
Soit une base orthonormée direct \((O, \overrightarrow{e_x}, \overrightarrow{e_y}, \overrightarrow{e_z})\). On considère deux vecteurs \(\overrightarrow{u} = u_x \overrightarrow{e_x} + u_y \overrightarrow{e_y}\) et \(\overrightarrow{v} = v_x \overrightarrow{e_x} + v_z \overrightarrow{e_z}\). Calculer le produit vectoriel \(\overrightarrow{u} \wedge \overrightarrow{v}\).
Calcul
On va utiliser succissement la bilinéarité puis les expressions des produits vectoriels des vecteurs de la base.
Coordonnées cartésiennes#
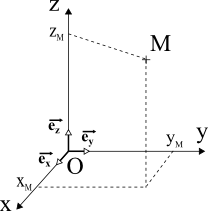
On définit notament un repère cartésien comme un repère orthonormé direct: \((O, \overrightarrow{e_x}, \overrightarrow{e_y}, \overrightarrow{e_z})\) où \((\overrightarrow{e_x}, \overrightarrow{e_y}, \overrightarrow{e_z})\) forme un trièdre direct.
Il s’agit à nouveau d’un repère global.
Coordonnées cylindriques#
Le système de coordonnées cylindriques revient à repérer le point M sur les bords d’un cylindre. Il faut alors le rayon et la hauteur du cylindre et l’angle de rotation par rapport à une référence.
Important
Coordonnées cylindriques.
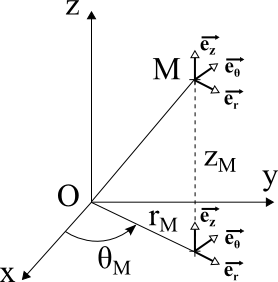
Soit un repère cartésien \((O, \overrightarrow{e_x}, \overrightarrow{e_y}, \overrightarrow{e_z})\), soit un point M quelconque de l’espace et H son projeté orthogonal dans le plan \((O , \overrightarrow{e_x} , \overrightarrow{e_y})\). On définit les coordonnées cylindriques (d’axe Oz) de M notées \((r , \theta, z)\) par:
\(r = OH\)
\(\theta=(\overrightarrow{e_x} ,\overrightarrow{OH})\), le plan \((O, \overrightarrow{e_x}, \overrightarrow{e_z})\) étant orienté par \(\overrightarrow{e_z}\)
\(z\): coordonnées cartésiennes suivant\( \overrightarrow{e_z}\) \end{itemize}
Base cylindrique
On définit la base locale cylindrique (cf. figure précédente) associée au point M par la famille \((\overrightarrow{e_r} ; \overrightarrow{e_{\theta}}, \overrightarrow{e_z})\) tel que:
\(\overrightarrow{e_z}\) est le vecteur de la base cartésienne.
vecteur radiale: \(\overrightarrow{e_r}\) est défini tel que \(\overrightarrow{OH} = r \overrightarrow{e_r}\).
vecteur orthoradiale: \(\overrightarrow{e_{\theta}}\) tel que la base \(( \overrightarrow{e_r}, \overrightarrow{e_{\theta}}, \overrightarrow{e_z})\) soit une base orthonormée directe soit: \(\overrightarrow{e_{\theta}}= \overrightarrow{e_z} \wedge \overrightarrow{e_r}\)
Attention
\(\overrightarrow{e_{\theta}}\) pointe toujours dans le sens des \(\theta\) croissants.
C’est une base locale, cela veut dire que les vecteurs dépendant du points M. Autrement dit, si l’on suit un point M mobile, les vecteurs de la base varieront au cours du temps.
Rappel
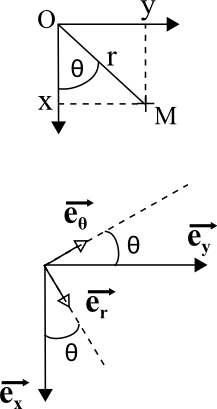
Les relations entre \((r, \theta)\) et (x,y) ainsi qu’entre les vecteurs de la base cylindriques et les vecteurs de la base cartésiennes sont les mêmes que les relations entre la base polaire et la base cartésienne dans le plan. On pourra s’en convaincre avec la représentation du plan perpendiculaire à l’axe Oz et passant par le point M (attention, le centre du plan n’est pas nécessairement le point O):
Coordonnées sphériques#
Les coordonnées sphériques reviennent à placer le point M sur une sphère et repérer ses coordonnées. Il faut ainsi le rayon de la sphère et deux coordonnées angulaires pour le placer sur la sphère. A l’image du repérage sur le globe terrestre, on utilisera un axe de référence (l’âxe des pôles) pour définir la colatitude (on ne travaille pas avec la latitude pour des raisons mathématiques non développées ici) et un méridien de référence pour définir la longitude (ou azimuth).
Définition#
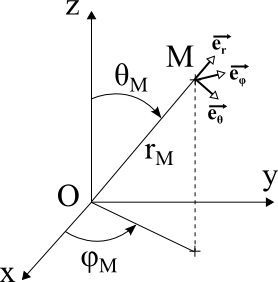
Coordonnéees sphériques
Soit un repère cartésien \((O, \overrightarrow{e_x}, \overrightarrow{e_y}, \overrightarrow{e_z})\), soit un point M quelconque de l’espace et H son projeté orthogonal dans le plan \((O , \overrightarrow{e_x} , \overrightarrow{e_y})\). On définit les coordonnées sphériques (d’axe Oz) de M notées \((r , \theta, \phi)\) par:
\(r = OM\)
Colatitude: \(\theta=(\overrightarrow{e_z} ,\overrightarrow{OM})\) avec \(\theta \in [0; \pi]\)
Azimuth: \(\phi = (\overrightarrow{e_x} ,\overrightarrow{OH})\) avec \(\phi \in [0; 2 \pi]\). Le plan \((O, \overrightarrow{e_x}, \overrightarrow{e_z})\) étant orienté par \(\overrightarrow{e_z}\)
Attention
Définition des angles Il faut noter la différence de domaine de définition de \(\theta\) et \(\phi\). Elle est cruciale pour que chaque point possède un jeu de coordonnées uniques.
Parallèle et méridien
On définit le parallèle au point M comme le plan passant par M est parallèle au plan \((O , \overrightarrow{e_x} , \overrightarrow{e_y})\) (donc perpendiculaire à \(Oz\)).
On définit le méridien au point M comme le plan passant par M et contenant \(Oz\). \(\phi\) est l’angle entre le plan \(xOz\) et le méridien.
Important
Base sphérique
On définit la base locale sphérique (cf. figure précédente) associée au point M par la famille \((\overrightarrow{e_r} ; \overrightarrow{e_{\theta}}, \overrightarrow{e_{\phi}})\) tel que:
vecteur radiale: \(\overrightarrow{e_r}\) est défini tel que \(\overrightarrow{OP} = r \overrightarrow{e_r}\).
vecteur azimutal: \(\overrightarrow{e_{\phi}} = \overrightarrow{e_z} \wedge \frac{\overrightarrow{OH}}{OH}\): il est dans le plan \((O , \overrightarrow{e_x} , \overrightarrow{e_y})\) perpendiculaire à (OH) dans le sens des \(\phi\) croissants.
\(\overrightarrow{e_{\theta}} = \overrightarrow{e_{\phi}} \wedge \overrightarrow{e_r}\): il est dans le plan du méridien, orthogonal à \(\overrightarrow{e_r}\) et dans le sens des \(\theta\) croissants.
Relation sphérique-cartésien#
Il est extrêmement important de savoir passer des coordonnées sphériques aux coordonnées cartésiennes et réciproquement.
Exercice
Exprimer la coordonnées radiale r en fonction de x, y et z et les coordonées x,y et z en fonction des coordonnées sphériques.
Exprimer les vecteurs de la base sphérique dans la base cartésiennes en faisant intervenir les coordonnées angulaires du point M.
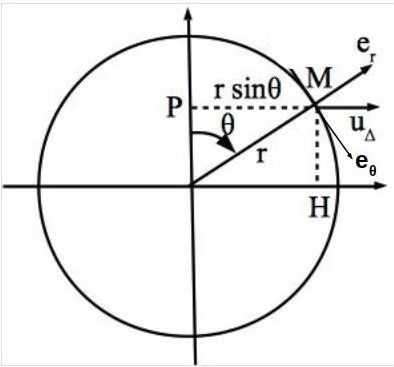
Correction
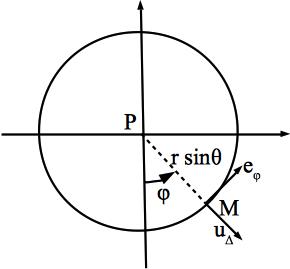
La méthode la plus simple est de passer par le parallèle et le méridien pour réaliser les projections et les calculs trigonométriques. On utilise notamment le vecteur unitaire \(\overrightarrow{u_{\Delta}}\) qui porte la droite PM (P est le centre du cercle parallèle) car il présente l’intérêt d’être présent dans les deux plans: celui du méridien (cf. schéma) et celui du parallèle.
Coordonnées
Il vient (utiliser les schémas de coupe du parallèle et du méridien - s’entraîner à le prouver):