Champs scalaires et champs vectoriels
Contents
Champs scalaires et champs vectoriels#
Nous allons être très souvent confrontés à des grandeurs définies en tout l’espace (ou portion). On parlera de champ. On peut citer l’énergie potentielle qui peut se définir en tout point de l’espace.
Champ vectoriel et champ scalaire#
Important
Champ vectoriel et champ scalaire
Soit une fonction f qui associe à tout point de l’espace un réel (un scalaire). On dit que f est un champ scalaire.
Soit une fonction f qui associe à tout point de l’espace un vecteur. On dit que f est un champ vectoriel. Par convention, on note les champs vectoriels avec une flèche comme des vecteurs.
Expression des champs
Un champ scalaire peut être vu comme une fonction de trois variables: les trois coordonnées de l’espace. Il pourra avoir différentes expressions suivant le système de coordonnée choisi.
Un champ vectoriel peut être vu comme un vecteur dont les coordonnées dépendent du point M (trois fonctions scalaires). Cette vision suffit lorsqu’on est en coordonnées cartésiennes où la base est globale. Si l’on exprime le champ vectoriel dans des coordonnées cylindriques ou sphériques, il ne faut pas oublier que les vecteurs de la base vont aussi varier avecle point M.
Exemple
Considérons l’énergie potentielle associée à une force (par exemple la pesanteur). On peut associer à tout point de l’espace \(M(x,y,z)\) une énergie potentielle \(E_p(x,y,z)\). Par exemple \(E_p(x,y,z) = mgz\) (dans ce cas, le champ ne dépend pas de x et y).
Un dispositif magnétique (aimant par exemple) crée un champ magnétique en tout point de l’espace. Il s’agit d’un champ vectoriel \(\overrightarrow{B}(M)\).
Dérivation et différentielle#
Dérivées partielles#
Important
Dérivées partielles
Soit un champ scalaire \(f(x,y,z)\), on définit la dérivée partielle \({(\frac{\partial f}{\partial x})}_{y,z}(x_0,y_0,z_0)\) comme la dérivée en \(x=x_0\) de la fonction \(g\) qui à \(x\) associe \(g(x) = f(x,y_0,z_0)\).
Cela revient à traiter \(f\) comme une fonction d’une variable où y et z sont des constantes. On parle de dérivée partielle de f par rapport à x à y et z constants.
Interprétation
On rappelle qu’une dérivée est un taux de variation qui donne une information sur la pente de la courbe. Ici, il s’agit d’une fonction de plusieurs variables, sa représentation n’est plus une courbe (cette représentation n’est d’ailleurs possible que pour une fonction de deux variables: c’est une surface). Mais on peut s’intéresser au taux de variation dans une direction particulière: celle où une seule des variables varie (x pour une dérivée partielle par rapport à x).
Les dérivées partielles donnent donc des informations sur les variations d’un champ scalaire dans certaines directions de l’espace. Mais nous allons voir qu’avec ces informations, on peut obtenir la variation du champ scalaire en un point M dans n’importe quelle direction de l’espace.
Calcul de dérivées partielles#
Exercice
On considère les fonctions:
Calculer toutes les dérivées partielles.
Correction
On trouve:
Déplacement infinitésimal#
Un déplacement élémentaire \(\overrightarrow{dOM}\) correspond à un déplacement infinitésimal (c’est-à-dire tendant vers O) à partir du point M vers un point M’: \(\overrightarrow{dOM} = \overrightarrow{MM'}_{M' \to M}\).
Chemin
On ne précise pas ici comment M’ tend vers M (en ligne droite, en ligne courbe, suivant l’axe Ox, suivant une direction dans le plan xOy… ). Suivant les cas cette précision a son importance. On distingue deux cas:
on utilise un déplacement infinitésimal le plus général possible. On considère alors que chaque coordonnées du point M varie de manière infinitésimal et indépendante pour donner les coordonnées du point M’.
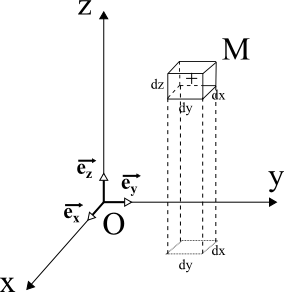
Par exemple, en coordonnées cartésiennes, on va passer d’un point \(M(x,y,z)\) à un point \(M'(x+dx,y+dy,z+dz)\) où dx, dy et dz représentent des variations infinitésimales des trois coordonnées.
on utilise un déplacement infinitésimal dans une direction particulière. C’est en général le cas quand on suit une courbe (une trajectoire par exemple). On peut alors utiliser l’expression du déplacement élémentaire général en préciser des expressions pour les variations élémentaires.
Important
Déplacement infinitésimal en coordonnées cartésiennes. On rappelle qu’on passe d’un point \(M(x,y,z)\) à un point \(M'(x+dx, y+dy, z+dz)\). Il vient que le déplacement élémentaire est:
En effet, on observe sur le schéma suivant que l’on peut décomposer le vecteur en une somme de trois vecteurs dans chaque direction Ox, Oy et Oz de distance respectives dx, dy et dz.
Important
Déplacement infinitésimal en coordonnées cartésiennes. Le déplacement élémentaire en coordonnées cylindriques s’écrit:
La démonstration est en ligne.
Démonstration
On fait varier chaque coordonnées de manière élémentaire. On passe donc du point \(M(r, \theta, z)\) au point M’ \((r+ dr, \theta + d\theta, z + dz)\).
On va décomposer le déplacement élémentaire siuvant trois directions: suivant \(\overrightarrow{e_{\theta}}, \overrightarrow{e_r}\) et \(\overrightarrow{e_z}\). Il faut noter que le déplacement “courbe” se fait suivant sa tangente (donc suivant \(e_{\theta}\) puisqu’il s’agit d’une variation infinitésimale, donc tendant vers 0.
Les successifs sont déplacements sont \(r d\theta \overrightarrow{e_{\theta}}, dr \overrightarrow{e_r}\) et \(dz \overrightarrow{e_z}\).
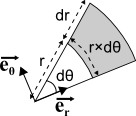
Il vient un déplacement élémentaire:
Important
Déplacement infinitésimal en coordonnées sphériques. Le déplacement élémentaire en coordonnées sphériques s’écrit:
La démonstration est en ligne.
Démonstration
On fait varier chaque coordonnées de manière élémentaire. On passe donc du point \(M(r, \theta, \varphi)\) au point M’ \((r+ dr, \theta + d\theta, \varphi + d\varphi)\).
On va décomposer le déplacement élémentaire siuvant trois directions: suivant \(\overrightarrow{e_{\theta}}, \overrightarrow{e_{\varphi}}\) et \(\overrightarrow{e_r}\). Il faut noter que les déplacements “courbe” se fait suivant les tangentes au méridien (quand \(\theta\) varie) soit suivant \(\overrightarrow{e_{\theta}}\) et au parallèle (quand \(\varphi\) varie) soit suivant \(\overrightarrow{e_{\varphi}}\).
Les successifs sont déplacements sont \(r d\theta \overrightarrow{e_{\theta}}, r \sin \theta d\varphi \overrightarrow{e_{\varphi}}\) et \(dr \overrightarrow{e_r}\).
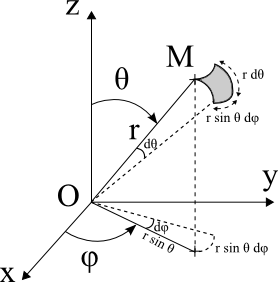
Il vient un déplacement élémentaire:
Différentielle#
Attention, il ne s’agit pas d’une définition mathématique mais d’une description physique permettant de raisonner.
Différentielle
Considérons un point M de l’espace et un déplacement infinitésimal quelconque \(\overrightarrow{dOM}\).
La différentielle df du champ scalaire f autour du point M est la variation infinitésimale de f du point M vers un point M’ tel que \(\overrightarrow{MM'} = \overrightarrow{dOM}\).
Expression générale de la différentielle. (Admis)
La différentielle du champ f en un point M de coordonnées \((\xi,\zeta,\eta)\) est:
où \((\xi,\zeta,\eta)\) représentent les 3 coordonnées du point M dans un système de coordonnées.
Gradient#
Gradient#
Observation
On désire généraliser le concept de dérivée. Si l’on se base sur la notion du taux de variation, on peut dire que lorsqu’on se déplace de \(dx \), la dérivée \(f'(x)\) permet de connaître la variation df de la fonction f: \(df = f'(x) dx\) (on rappelle que c’est une égalité car le passage à la limite est implicite avec la notation différentielle).
Ici on veut connaître la différentielle df de la fonction f en un point M pour un déplacement élémentaire \(\overrightarrow{dOM}\).
Important
Gradient On définit le gradient de la fonction f en en un point M comme le vecteur noté \(\overrightarrow{grad}f\) tel que:
où df est la variation infinitésimale de f à partir du point M en suivant le déplacement élémentaire \(\overrightarrow{dOM}\).
Propriétés du gradient#
Avant d’établir les expressions du gradient dans chaque système de coordonnées, on va déjà établir certaines propriétés intéressantes du gradient.
Important
Intégration du gradient A l’image de la dérivée, on peut “intégrer” le gradient pour trouver une variation de la fonction f:
L’intégrale proposée ici est appelée “intégrale de chemin” car on va intégrer le produit scalaire \(\overrightarrow{grad}f \cdot \overrightarrow{dl}\) sur un chemin allant de A vers B. Dans ce cas, le déplacement élémentaire doit être tangent au chemin, ce qui conditionne a priori son expression (les déplacements élémentaires sont dépendants les uns des autres). Le calcul d’une intégrale de chemin sera explicitée en cours de physique (pour des calculs de travail d’une force).
Ici le chemin pour l’intégrale n’a pas d’importance: l’intégrale d’un gradient ne dépend pas du chemin parcouru. Elle se résume toujours à la différence des valeurs de la fonction f aux points A et B. C’est une caractéristique fondamentale qu’on réutilisera lorsqu’on parlera des forces dérivant d’une énergie potentielle.
Remarques
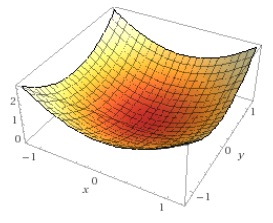
Analogie topographique : Il est conseillé pour mieux visualiser les caractéristiques suivantes d’imaginer un champ scalaire z(x,y) qui donnerait l’altitude z en un point de coordonnées (x,y) sur une carte topographique.
Orientation et sens du gradient : Le gradient est toujours orienté dans la direction où le champ f varie le plus fortement et dans le sens croissant de f (suivant la droite de plus grande pente).
Démonstration: la variation df est maximale quand \(\overrightarrow{grad}f \cdot \overrightarrow{dOM}\) est maximal soit quand le gradient est colinéaire (et dans le même sens) au déplacement élémentaire.
Courbe iso-f : Le gradient est toujours perpendiculaire aux courbes/surfaces où la fonction f est uniforme (f(x,y,z) = cste - les courbes iso-altitude sur une carte topographique).
Démonstration: Pour un déplacement élémentaire le long de la courbe iso-f (ou contenu dans la surface iso-f), la différentielle df est nulle. Il vient que le gradient est perpendicualaire à ce déplacement élémentaire donc à la courbe/surface.
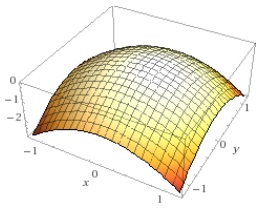
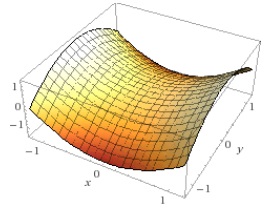
Nullité du gradient : Un gradient nul implique que chaque dérivée partielles est nulle, c’est-à-dire que la fonction f atteint un extremum suivant chaque coordonnées. On distingue alors plusieurs cas:
c’est un minimum local pour chaque coordonnées: c’est un minimum local du champ.
c’est un maximum local pour chaque coordonnées: c’est un maximum local du champ.
c’est un minimum pour une coordonnées et un maximum pour l’autre: c’est un point “col” (comme un col de montagne). Pour visualiser ces situations, on a représenté une surface topographique z(x,y) pour chaque cas (minimum, maximum, point col).
Expressions du gradient#
On rappelle que la différentielle s’écrit suivant le système de coordonnées choisi (précisons qu’a priori, l’expression de f dépend des coordonneés choisies):
On veut pouvoir déterminer l’expression du gradient qui sera le vecteur \(\overrightarrow{grad}f\) tel que \(df = \overrightarrow{grad}f \cdot \overrightarrow{dOM}\). On va donc utiliser les expressions du déplacement élémentaire dans les différents systèmes de coordonneés: \(\overrightarrow{dOM} = dx \overrightarrow{e_x} + dy \overrightarrow{e_y} + dz \overrightarrow{e_z}\), \(\overrightarrow{dOM} = dr \overrightarrow{e_r} + r d \theta \overrightarrow{e_{\theta}} + dz \overrightarrow{e_z}\) et \(\overrightarrow{dOM} = dr \overrightarrow{e_r} + r d \theta \overrightarrow{e_{\theta}} + r \sin \theta d\varphi \overrightarrow{e_{\varphi}}\).
Important
Expression du gradient dans les systèmes de coordonnées
En identifiant chaque terme du produit scalaire, il vient directement que: